本次挑戰要求參賽團隊製作一款並使用同一台自主式機器人能執行 『循跡辨識』、『物件操作』、『移動目標點選』等三個關卡,並在決賽當天挑戰這三大關卡。三項關卡並無操作上之規定順序,參賽隊伍可以依照設計之機器人強項選擇任一關卡優先進行,每一關卡中包含分項計分機制,參賽機器人完成每一分項都可以獲得該分項之分數,主辦單位規範參賽機器人必須完成第一關卡,第二與第三關卡則為選擇關卡,但主辦單位鼓勵參賽團隊參與每一關卡挑戰。
詳細規則請參閱 2016 NVIDIA 嵌入式智慧機器人設計競賽簡章 >
自主機器人第一關為循跡辨識任務。必須依照規劃的路徑並待在路徑內且避開路上的障礙物。自主機器人必須從任何”起點”出發,循著地上規劃的路徑圖,看到標示作出以下反應,並回到唯一的“終點”方算挑戰成功。機器人途中將會遇到 - STOP 標示,紅綠燈,道路障礙,隨意移動的小火車。

建議參考網站資料
(包含最新嵌入式 JETSON TX1 晶片應用)
本關卡分為兩大區塊 ~ 初階與進階關卡
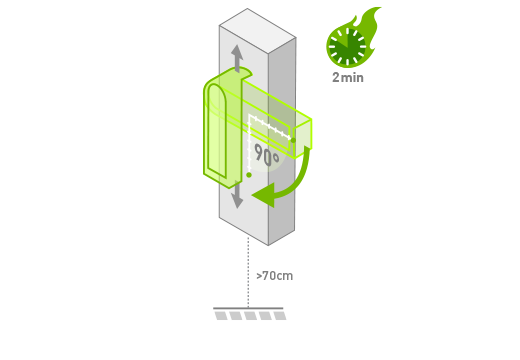
機器人定位於初始點,面對大會準備的一面背板,背板上有一只門把,每一次關卡門把滑軌產生任意不同高度變化後,機器手必須能視覺偵測到門把位置( 此判斷可以利用深度攝影機 或藍色把手部位偵測),並且完整扭轉到底(< 60 degree)。(門把 70cm 下限 from 地面,任意高度)
機器人必須從大會準備的三款鎖匙,視覺辨識出門板上非對稱圖形孔洞的形狀,並拿取正確形狀的鎖匙,塞入門板上的孔洞並成功配對與完整契合塞入孔洞中。鎖匙分為三種顏色與非對稱形狀。

建議參考 NVIDIA CUDA 平行運算平台 / NVIDIA 深度學習開發 SDK
機器人必須使用雷射裝置 (雷射筆) 進行射擊,能辨識並射擊螢幕上混合並隨機出現的五款目標物。目標物分為:花朵,卡車,巴士,汽車,貓 (動物圖片) 等五種日常物體。目標物出現的頻率與位置會在圖庫中不定時出現,機器人可以依照自身的計算去取決分數高低。

建議參考 NVIDIA CUDA 平行運算平台 /
NVIDIA 深度學習開發 SDK